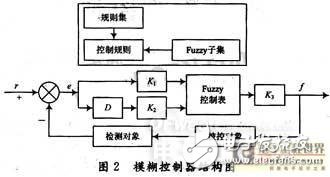
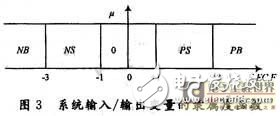
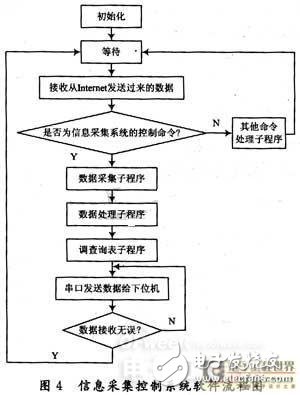
Remote rehabilitation is a multidisciplinary interdisciplinary subject that combines modern information and communication technology and rehabilitation medicine. It can be defined as: based on the comprehensive use of communication, remote sensing, remote control, computer, information processing and other technologies, Remote rehabilitation medical services. The starting points of foreign research in this area are different. In summary, the remote rehabilitation system is mainly used as a means of communication to eliminate the spatial barriers between assistive equipment evaluation experts and remote disabled people. As an auxiliary device evaluation and diagnosis system, to promote the development of rehabilitation medicine, etc., although mentioned, but no substantial research has been done. Domestic products in this regard are only reported by the Shenzhen Disabled Persons ’Federation, which developed the country ’s first remote rehabilitation system for the disabled, which focuses on the communication and exchange of experts and patients, so that disabled people can consult experts on the Internet for rehabilitation , Get advice on rehabilitation. Judging from the current developments at home and abroad, the research of all parties has relatively large limitations, and they are all in the initial stage. Therefore, it is of great significance to conduct research on remote rehabilitation system. In the long-distance rehabilitation system, the information collection system is its main component. How to effectively control the information collection system from a long distance, the advantages and disadvantages of its realization effect, and the speed of its realization, play a key role in the performance of the entire system. Since the remote rehabilitation information acquisition system is a multivariable, non-linear time-varying system, it is difficult to establish an accurate mathematical model of the entire synchronous control system. Therefore, it is necessary to use an effective control method-fuzzy control. The schematic diagram of the remote rehabilitation information collection and control system is shown in Figure 1. The system is a robot for auxiliary camera, it can accept instructions to observe a patient with a certain spatial curve as a path. This control system is mainly realized by two functional modules. One is the PC at the site site, which receives the control commands from the remote site through the Internet. After being processed by the fuzzy control algorithm, it is transmitted to the single chip processing system through the RS 232 serial port to control The movement of the trolley, the gimbal, and the camera. In addition, the PC at the site can also process the image information collected from the camera according to the requirements, and then present it to the remote site in an appropriate way through the Internet for the diagnosis and design of remote rehabilitation experts and auxiliary design manufacturers. The second is the single-chip microcomputer control system, which is mainly used to control the movement of the trolley, the gimbal, and the camera so that it can reach the appropriate position, so that remote rehabilitation experts can observe the patient's physical condition in real time without space and time restrictions, and perform remote diagnosis and evaluation. The single-chip microcomputer control system can also process the signals of sensors such as detecting the motor in place, and feedback the situation of controlling the execution unit of the fuzzy control system to the remote site. To put it simply, this fuzzy control system mainly realizes automatic control of the carriage loaded with the information collection device, the movement of the gimbal and camera that drives the camera, and collects real-time video or image information according to the requirements for diagnosis and auxiliary product design. The input variables of this system are: steering angle from trolley to target, distance from trolley to target, height of gimbal from target, direction angle and distance between camera and target, a total of 6 input variables. The output variables are: the running speed and direction of the rudder motor of the car, the running speed and direction of the drive motor of the car, the running speed and direction of the motor driving the gimbal up and down and the four steering directions of the gimbal, a total of 10 output variables. Therefore, the preliminary control objects of this information collection system have 6 input variables and 10 output variables, which belong to the fuzzy controller with multi-input and multi-output structure. Through fuzzy decoupling, this multi-input and multi-output fuzzy control structure is transformed into a single variable fuzzy controller for design. The following takes the control of the speed of the drive motor of the car as an example to explain the establishment of fuzzy control rules in detail. The driving motor of the trolley adopts a stepping motor, and its speed is controlled by changing the pulse frequency of the driving signal. Therefore, a single variable two-dimensional fuzzy controller is used to control the speed of the driving motor of the car, the input quantity is the error e of the distance between the car and the target and the rate of change ec of the error between the vehicle and the target, and the output variable is the frequency f of the control pulse. In the specific implementation method of fuzzy control, fuzzy look-up table method is adopted, and its principle is shown in Figure 2. Perform the range conversion on the error e and error change rate ec obtained by each sampling, that is, multiply by the scale factors k1 and k2, and then quantize, convert the input physical signal value to a point on the input domain, you can control it by query The action table obtains the output control quantity. It is the point on the output domain, and then multiplied by the scale factor k3 for range conversion to obtain the required control pulse frequency value f. The control action table is the corresponding relationship between the point on the input domain and the output on the domain. It has gone through the process of fuzzification, fuzzy reasoning and defuzzification, and can be calculated offline. The table lookup method has a simple structure, is easy to implement, has low resource overhead, and has a fast online operation speed. The basic fuzzy subsets of error e, error variation ec, and control variable f are {NB (negative large deviation), NS (negative small deviation), 0 (zero), PS (positive small deviation), PB (positive large deviation)} . In the system, the domain of the distance error e between the car and the target is E, the domain of the rate of change of the distance error ec between the car and the target is EC, and the domain of the output control amount f is F. According to the actual situation of the system, the size is quantified into 5 levels, which are {-3, -1, 0, +1, +3), select the membership function curve shown in Figure 3, the controller can complete the input Variable fuzzification. Fuzzy input variables are used for inference decision-making by fuzzy control rules, and fuzzy output language variables {NB (negative large), NS (negative small), 0 (zero), PS (positive small), PB (positive large)} are obtained. In the same way, the output of the reasoning of the fuzzy controller must also be transformed into the actual correction amount, and the pulse frequency of the speed of the driving motor of the car is adjusted to complete the control of the car speed. In order to simplify programming and facilitate real-time control, this system tabulates control rules. The fuzzy controller is controlled according to the control state table shown in Table 1. The selection of the quantization factors k1 and k2 of the error E and the error change rate EC has a great influence on the dynamic performance of the control system. k1 determines the response speed of the system. The larger the k1, the faster the response of the system, but the greater the overshoot, the longer the transition time. k2 affects the overshoot of the system. The larger the k2 selection, the smaller the overshoot of the system, but the longer the response time of the system. k3 is the total gain of the fuzzy controller. Choosing too small will make the system's dynamic response process longer, and choosing too large will cause the system to oscillate. The control rules of other control variables are similar to the above-mentioned control of the drive motor speed of the trolley. At present, there are three techniques for constructing fuzzy controllers: using traditional single-chip microcomputers or microcomputers as the physical basis, compiling corresponding software to achieve fuzzy inference and control; using single-chip microcomputers or integrated circuit chips to construct fuzzy controllers, and using configuration data to determine fuzzy controllers The structure form; adopts programmable gate array to construct fuzzy controller. Since the site of the remote rehabilitation system needs a microcomputer as a remote control command and processes image information from the camera and transmits the information through the Internet, in order to fully utilize and save resources, we use the microcomputer as the physical basis and compile the corresponding software implementation Fuzzy reasoning and control. The software design of the host computer for fuzzy control is mainly the design and implementation of the fuzzy control algorithm, and also includes the design and implementation of the serial communication part of the microcomputer and the single-chip computer and the interface part with the Internet. The program flow is shown in Figure 4. This part mainly realizes the fuzzy control function of the information collection system. Before the system runs, the host computer program must first be initialized, set the serial port, and prepare for the system to run correctly. When the remote control command is transmitted to the PC at the site site through the Internet, it is processed by the fuzzy control algorithm, and then the command is issued to the microcontroller control system via the serial port for execution. This control process does not require the personnel at the site to operate, and the remote control is completely adopted, so that the remote expert can easily control the operation of the information collection system according to the need, and it also facilitates the local physician or the patient's family, reducing the number of remote experts. Operation errors caused by communication barriers with local doctors or family members. This system uses fuzzy control technology to solve the remote intelligent control of the remote rehabilitation information collection system, so that remotely located rehabilitation experts and auxiliary designers can conveniently remotely control the local information collection system through the Internet in a suitable way and angle accurate, real-time Collect data information for diagnosis and auxiliary product design. The test proves that the control system meets our design requirements and can collect remote 3D visual information in real time. Maskking High Gt,Maskking Coconut Ice,Masking High Pro,Disposable Vape Maskking Shenzhen Zpal Technology Co.,Ltd , https://www.zpal-vape.com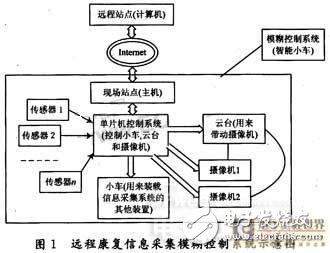

Remote rehabilitation information collection system: can remotely collect real-time 3D visual information
1 Introduction