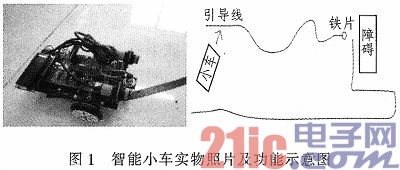
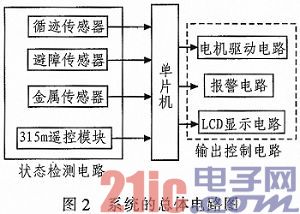
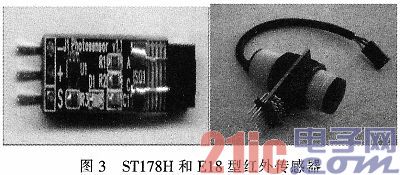
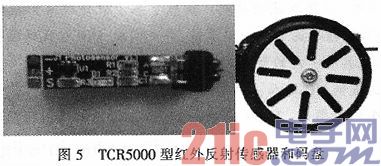
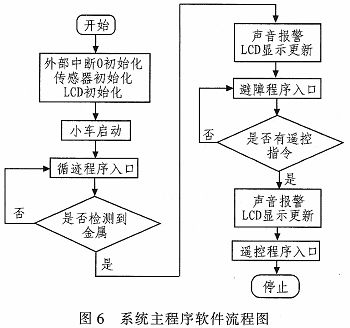
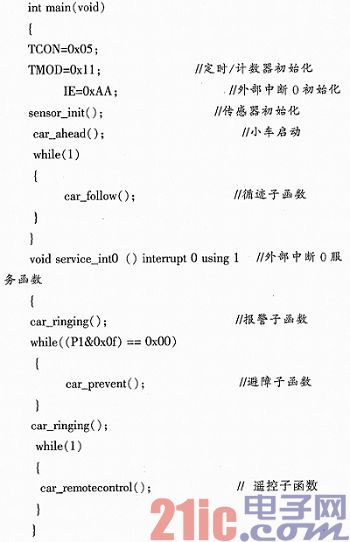
With the rapid development of science and technology and the continuous development of sensor technology, the development and development of intelligent mobile robots in various countries have also increased, and all kinds of robots have entered all aspects of social life. Instead of manpower, robots can carry out many dangerous activities and enter some space that humans can hardly get involved in, such as the "Yutu" lunar rover that successfully landed on the moon not long ago. The trolley designed in this paper can be applied to the fields of unmanned motor vehicles, unmanned factories, warehouses, etc., and has practical application and promotion value. This article refers to the address: http:// 1 overall system design The car designed in this paper adopts 51 single-chip microcomputer as the control core, uses photoelectric sensor to detect the movement state of the trolley, performs tracking and obstacle avoidance, and displays the movement state of the trolley in real time by the LCD. After the metal sensor detects the iron piece, the car enters the obstacle avoidance state by tracking state. Pressing the remote control can make the car enter the remote control state, and each state transition has an alarm indication. The physical photo and function diagram of the smart car is shown in Figure 1. 2 system hardware design 2.1 Overall hardware design According to the design task requirements and the analysis of the function implementation, draw the overall circuit diagram of the system, as shown in Figure 2. The entire system is modular in design and simple to implement. The system mainly takes the minimum control system of the single chip as the core, including the power module interface, peripheral sensor interface, LCD display interface, remote control module interface, motor drive module interface, alarm module interface, etc., all of which together constitute the whole of the smart car. 2.2 Subsystem hardware design 2.2.1 Tracking and obstacle avoidance module To realize the automatic tracking function and the obstacle avoidance function, the robot must sense the guide lines and obstacles, and the sensing guide line gives the robot a visual function. Auto-tracking is based on the AGV-auto-guidedvehicle system, which selects the right route to travel. Use a line that is significantly different from the ground color to guide, using the sensor to sense the guide line and obstacle judgment. For the sake of simplicity, five infrared reflective photoelectric sensors are used in the system for tracking and obstacle avoidance. Three ST178H infrared sensors are used for tracing, and two E18 types are used for obstacle judgment. The sensor is shown in Figure 3. . 2.2.2 Metal Detection Module When the car travels to the end of the black line, the end point needs to be detected, and the controller issues an instruction to enter the corresponding program. As long as a piece of iron is placed at the end of the running track, and then the metal piece is used to detect the metal piece, the circuit is simple and does not occupy a lot of CPU resources. In this paper, LJ12A3-Z-4/BX inductive metal proximity switch sensor is selected. The sensor is small in size, low in power consumption, and the working current is only 0.5~3 mA. It is convenient to use and the output signal can be directly connected to the single chip microcomputer. 2.2.3 Remote control module Wireless data transmission is widely used in the fields of vehicle monitoring, remote control, telemetry, small wireless networks, wireless data communication, robot control, digital audio, digital image transmission and the like. In order to achieve remote control of the car, a wireless remote control module is required. This paper adopts DF wireless data transceiver module, its working frequency is 315MHz, which is the universal ISM frequency band and the transmission frequency is <500mW. The DF wireless transceiver module combined with the codec chip PT2262/2272 can transmit and decode the data sent by the single chip microcomputer after being encoded and decoded. The DF wireless transceiver module has the characteristics of long transmission distance and strong anti-interference. The physical diagram of the wireless transmit/receive module is shown in Figure 4. 2.2.4 Display Module When the car is traveling, it is necessary to display the current working state, and the display device is indispensable. Considering the need to display a large number of letters, the system chose to use the 1602 LCD display. 1602 means that each line displays 16 characters and can display two lines. It is a character LCD, that is, it can only display ASCII characters, such as numbers, uppercase and lowercase letters, various symbols, and so on. The system uses 1602 for 5 V voltage drive, 16-pin interface, with backlight, built-in 128-character ASCII character set font library, only parallel interface, no serial interface. 2.2.5 Speed ​​measuring module Two TCR5000 infrared reflection sensors are used in the system to measure the wheel speed. The wheel has a black and white interval code wheel. The single chip counts the pulse output by the sensor, and calculates the speed of the car by calculating the number of pulses in a certain period of time. TCR5000 infrared reflection sensor and code wheel are shown in Figure 5. 3 software design The system software design adopts C language programming, and adopts modular design, and each function software is written as a sub-function. Each function module has strong independence, and can be called as long as needed, and has good portability. The system software design mainly includes the initialization of external interrupt 0, car sensor initialization, LCD initialization and real-time display working status, car start, tracking program, metal detection program, sound alarm program, interrupt service function, obstacle avoidance program, detection remote command, Sound alarms, remote control programs, etc. The main program flow chart is shown in Figure 6. After the power is turned on, the MCU power-on reset, initialize the external interrupt 0, then call the sensor initialization function, the LCD initialization function, start the car, the LCD displays the current state of the car, starts calling the tracking function, and detects the black line, according to the sensor. The signal judges the positional relationship between the car and the black line, and the corresponding driving signal is output by the single-chip microcomputer to control the rotation speed of the left and right wheels, so that the car always keeps walking along the black line. When the car travels to the end of the black line, the metal sensor detects the iron piece, the car emits an audible alarm, enters the interrupt service function, calls the obstacle avoidance function, starts obstacle avoidance, and updates the LCD display content. When encountering an obstacle, the car will change direction and drive around obstacles. When the remote control button is pressed, the car receives the command, issues an audible alarm, jumps out of the obstacle avoidance program, enters the remote control program, and updates the LCD display content. At this point, the car can be remotely recovered to complete the entire test task. The main program of the C51 language is as follows: 4 Conclusion Advanced development of smart cars can be equipped with GPS (Global Positioning System) or Internet-based interface circuits, cameras, etc., enabling it to have global mobility and remote control. Typical applications are remote reconnaissance robots, intelligent detection robots, etc. With continuous development and the use of products, intelligent tracking and obstacle avoidance vehicles will have wider application prospects and use value in trackless trains and driverless driving.
Fully Automatic Washing Machine can make your clothes more clean in a very convenient way. With PCB control, different procedures can choose more ways to wash different clothes. Nowadays fully automatic washing machines are widely used in home, hotels and laundry shops.
Our well-equipped facilities and excellent quality control throughout all stages of production enable us to guarantee total customer satisfaction. Besides, we have received CE, CB, RoHS and CCC certifications.
As a result of our high quality products and outstanding customer service, we have gained a global sales network reaching America, Asia, Europe, Africa, the Middle East and other countries and regions.
If you are interested in any of our products or would like to discuss a custom order, please feel free to contact us. We are looking forward to forming successful business relationships with new clients around the world in the near future.
3~5kg Fully Automatic Washing Machine 5Kg Fully Automatic Washing Machine,Mini Fully Automatic Washing Machine,Fully Automatic Baby Washing Machine,Small Fully Automatic Washing Machine Ningbo Banshen Electric Appliance Co., Ltd , https://www.banshendq.com