Spring Clamp Terminal Block,Spring Terminal Connector,Spring Loaded Terminal Blocks,Spring Cage Terminal Block Cixi Xinke Electronic Technology Co., Ltd. , https://www.cxxinke.com
Secondly, it is the re-planning in the flight process, that is, according to the sudden situation encountered during the flight, such as terrain, meteorological changes, unknown flight limitation factors, etc., the flight path is changed dynamically or the action task is changed. 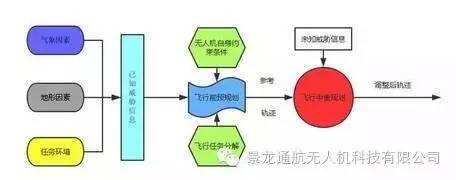
The route planning includes the departure location, the route location, the location relationship information of the destination point, the flight altitude and speed, and the time period that needs to be reached. Route planning should have the following features:
1 With standard flight trajectory generation function, it can generate common standard flight trajectories, such as circular hovering, 8-shaped hovering, reciprocating straight flight, etc., stored in the standard flight trajectory database, so that the aircraft can be made according to the needs of the mission during the flight. Enter and exit standard flight trajectories in a timely manner.
2 With the conventional flight path generation and management functions, it can generate regular flight routes for searching for specific areas and store them in the regular route library. The routes in the route library take into account the sensor characteristics and sensor search mode (including search speed, search). After the factors such as the time and the sensor's observation orientation (including the search radius, search direction, observation distance, and observation angle), the best detection of the target can be achieved!
How to plan a drone route?
The route planning is generally divided into two steps: firstly, pre-flight pre-planning, that is, according to the established tasks, combined with environmental constraints and flight constraints, the optimal reference path is formulated as a whole;